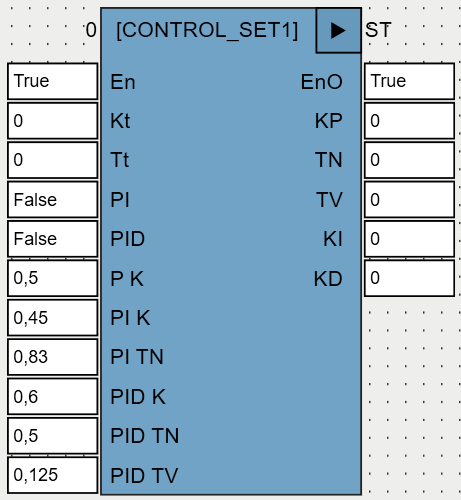
Вид ФБ в редакторе программ языка FBD:
Входы и выходы ФБ:
Название |
Тип |
Описание |
Входы |
||
KT |
REAL |
Критический KP. |
TT |
REAL |
Период критической вибрации. |
PI |
BOOL |
Устанавливаются в соответствии с типом регулятора, для которого определяются параметры: П – PI=PID=0; ПИ – PI=1, PID=0; ПИД – PI=0, PID=1; |
PID |
BOOL |
|
P_K |
REAL |
Константа (0.5 по умолчанию) для вычисления KP П-регулятора. |
PI_K |
REAL |
Константа (0.45 по умолчанию) для вычисления KP ПИ-регулятора. |
PI_TN |
REAL |
Константа (0.83 по умолчанию) для вычисления TN ПИ-регулятора. |
PID_K |
REAL |
Константа (0.6 по умолчанию) для вычисления KP ПИД-регулятора. |
PID_TN |
REAL |
Константа (0.5 по умолчанию) для вычисления TN ПИД-регулятора. |
PID_TV |
REAL |
Константа (0.125 по умолчанию) для вычисления TV ПИД-регулятора. |
Выходы |
||
KP |
REAL |
Коэффициент пропорциональной части регулятора. |
TN |
REAL |
Время регулирования. |
TV |
REAL |
Время дифференцирования. |
KI |
REAL |
Коэффициент интегральной части регулятора. Если TN>0, то KI=KP/TN, в противном случае KI=0. |
KD |
REAL |
Коэффициент дифференциальной части регулятора. Вычисляется по формуле KD=KP*TV. |
ФБ CONTROL_SET1 вычисляет настроечные параметры П-, ПИ- и ПИД-регуляторов по методу Циглера-Николса (Ziegler-Nichols) для замкнутых контуров управления. Метод Циглера-Николса для замкнутых контуров применим не ко всем регуляторам, а также занимает длительное время в случае медленных регуляторов.
В соответствии с этим методом, регулятор переводится в режим П-регулятора (например, с помощью обнуления коэффициентов интегральной и дифференциальной составляющих), в контуре управления создается малое возмущение (например, путем изменения уставки), а затем коэффициент пропорциональной части KP регулятора линейно увеличивается от 0 до тех пор, пока при некотором критическом KP=KT на выходе регулятора не возникают вибрации с постоянной амплитудой и периодом TT. По KT и TT ФБ вычисляет настроечные параметры регулятора:
Тип регулятора |
KP |
TN |
TV |
П |
P_K*KT |
|
|
ПИ |
PI_K*KT |
PI_TN*TT |
|
ПИД |
PID_K*KT |
PID_TN*TT |
PID_TV*TT |
Если используются константы по умолчанию, вычисления производятся по следующим формулам:
Тип регулятора |
KP |
TN |
TV |
П |
0.5*KT |
|
|
ПИ |
0.45*KT |
0.83*TT |
|
ПИД |
0.6*KT |
0.5*TT |
0.125*TT |