Опрос контроллеров Stabur происходит по протоколу Stabur_CAN по умолчанию. Поэтому добавлять протокол в узел не требуется.
Настройки протокола задаются в настройках элемента Модуль CAN:
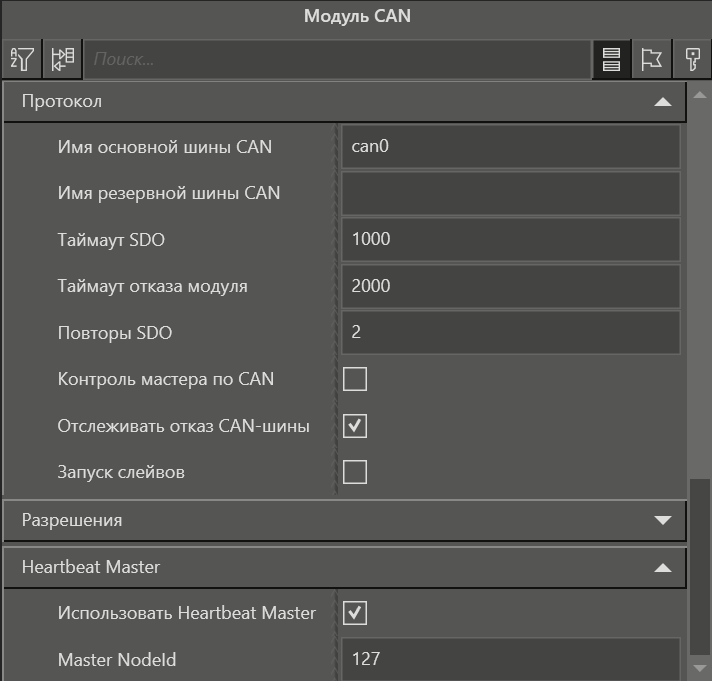
Основные настройки протокола задаются в категориях Протокол и Heartbeat Master панели свойств:
Настройки, применимые к протоколу в панели свойств Встроенные модули:
Свойство |
Описание |
|---|---|
Категория Протокол |
|
Имя основной шины CAN |
Указывается имя основной шины, которое задано в контроллере. Берется из документации. Регистр вводимых символов учитывается. |
Имя резервной шины CAN |
Указывается имя резервной шины, которое задано в контроллере. Берется из документации. Регистр вводимых символов учитывается. Если указать имя, то включается две шины, которые будут вести параллельный опрос модуля. |
Таймаут SDO |
Время ожидания ответа от устройства при запросе SDO. |
Таймаут отказа модуля |
Устройства CANopen в процессе работы формируют специальные сообщения сердцебиения (Heartbeat), если их нет - модуль не работает. Протокол отслеживает все поступающие Heartbeat и сбрасывает таймер. Если не поступало сообщений в течение заданного времени в данном свойстве, то выдается отказ модуля. |
Повторы SDO |
Определяет, сколько сделать повторов, если на запрос SDO не было ответа. |
Контроль мастера по CAN |
Если настройка включена, то осуществляется контроль наличия мастера по CAN-шине. При отключении настройки контроль мастера осуществляется по сети Ethernet. |
Отслеживать отказ CAN-шины |
Настройка включена по умолчанию. |
Запуск слейвов |
Перевод всех модулей в режим Operational. |
Категория Heartbeat Master |
|
Использовать Heartbeat Master |
Определение скорости шины CAN - задача разработчика конечных устройств. Некоторые производители фиксируют значение, некоторые делают механические переключатели. Центральный модуль при старте начинает выдавать свои Heartbeat сообщения с адресом 127. Модули в момент включения перебирают скорости, получают пакеты и остаются на этой скорости. Если установлен флаг в данном свойстве, то будет использование этого режима, для встроенных модулей контроллера Stabur включено по умолчанию, если флаг снят, то не будет. |
Master NodeID |
Определяется ID контроллера, от которого будет слаться Heartbeat. Менять не надо. |
Информация о состоянии связи с ПЛК
Для получения информации о состоянии связи используются параметры Отказ и Ошибка протокола Stabur_CAN в группе Модуль CAN:
Параметр Отказ имеет тип значения BOOL. Если параметр принимает состояние TRUE, то это значит, что исполнительная система не может установить связь с данным протоколом.
Параметр Ошибка имеет тип значения STRING. Если у исполнительной системы нет связи со всеми модулями ввода/вывода, то параметр принимает значение No connection.